
Пользователи могут обучать робота-дворецкого Toyota с помощью виртуальной реальности, заранее показывая ему (даже сложные) задачи, которые ему предстоит выполнять.
Пять лет назад Toyota объявила о выделении 1 млрд долларов на Исследовательский институт (TRI) и наняла сотни инженеров для работы над роботами и продуктами на основе искусственного интеллекта, такими как беспилотные автомобили.
На этой неделе TRI предложил журналистам возможность принять участие в виртуальном дне открытых дверей (вы можете посмотреть его часть в видео, которое я разместил в посте), чтобы узнать о современном состоянии исследований, проводимых лабораторией.
Дорогой, ты купил новую люстру или просто рад меня видеть?

Большинство прототипов, показанных на мероприятии, направлены на помощь людям в их домах. Идея робота-помощника существует уже несколько десятилетий, но лишь недавно стала реализовываться в реальности, особенно в таких странах, как Япония, где старение населения может привести к нехватке вспомогательного персонала.
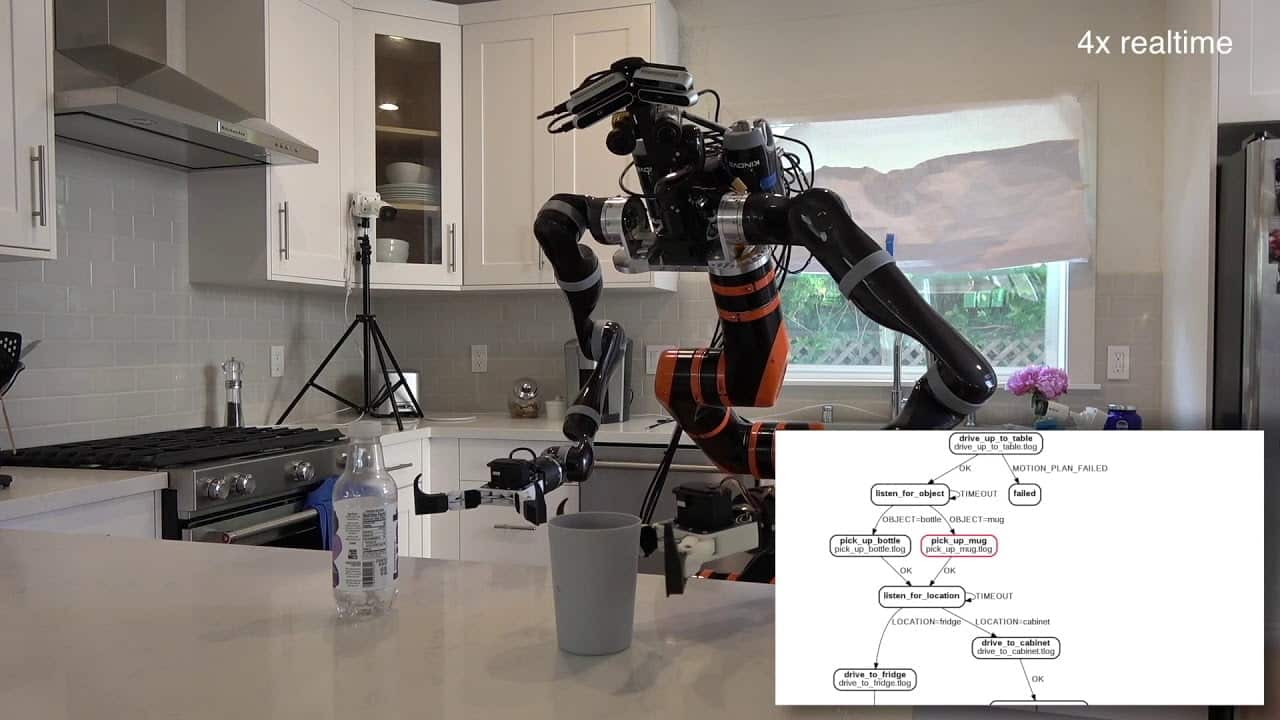
Робот-дворецкий Toyota
Основная конструкция домашнего робота TRI предназначена для подвешивания на специальном наборе направляющих, встроенных в потолок дома. Настоящая «релевантность», действующая в ограниченном (и, следовательно, хорошо контролируемом) радиусе.
Немного отличается от робота-дворецкого, которого мы себе представляли, бродящего по дому со своим красивым подносом в руке, но Toyota, очевидно, осознала ряд преимуществ. Одним из них является небольшая площадь дома.
В такой конфигурации роботу-дворецкому потребуется гораздо меньше времени, чтобы изучить планировку дома. Ему не нужно изучать сложные маршруты вокруг препятствий, чтобы добраться из одного места в другое.
Робот TRI может складываться до потолка, когда он не используется, поэтому он практически не занимает полезного пространства.
Привилегированный вид
Однако одним из самых больших преимуществ этого решения, по-видимому, является особая точка зрения сверху вниз. Это дает машине лучший обзор для наблюдения за ее действиями и положением различных объектов, которыми ей, возможно, придется манипулировать.
Toyota делает ставку на концепцию робота-дворецкого, который учится на основе ограниченного набора параметров. По сути, если вы хотите, чтобы робот научился мыть столешницы, вы можете выполнить это действие в среде виртуальной реальности. Робот-дворецкий поймет ваши действия и будет имитировать их в реальном мире, естественным образом отслеживая переменные.
Это может показаться громоздким, но это не так. Учтите, что через некоторое время вокруг появится множество действий, которым также будут обучать других роботов и публиковать их в Интернете, что немного похоже на автоматические рецепты некоторых кухонных роботов.
Как устроен робот-дворецкий?
Многочисленные шарниры манипулятора позволяют ему двигаться во всех направлениях. Некоторые из суставов являются избыточными, что позволяет им вращаться и ориентироваться практически в любом положении.
Теперь осталось доработать только одну деталь: чтобы установить такого робота-дворецкого, весь дом, по сути, должен быть спроектирован вокруг машины.
В идеале робот должен быть центральной частью планирования дома до начала строительства.
Поэтому я бы сказал, что эта концепция имеет больше смысла в многоквартирных зданиях, таких как учреждения по уходу за престарелыми. Если бы строители могли заставить устройства выглядеть почти одинаково внутри, инженеры могли бы обучить только одного робота, а затем поделиться информацией с остальными машинами в других комнатах.
Другие детали
Помимо полнофункционального бота, TRI также продемонстрировала некоторые более мелкие аспекты этой технологии. Одним из самых важных является коготь, которым робот-дворецкий будет подбирать предметы. Система освещения проецирует серию точек внутри роботизированной «руки» и камеры, чтобы наблюдать, как точки на конечности деформируются, когда она поднимает объект.
В результате система может анализировать в режиме реального времени свойства объекта, с которым она взаимодействует. Демонстрация показала, как он ставит несколько изящных бокалов друг на друга на незнакомой поверхности.
Прогресс Toyota и TRI впечатляет, и, несмотря на энтузиазм, они планируют продолжать работу над этой технологией в будущем. Планов сделать его доступным для широкой публики пока нет, но компания надеется реализовать хотя бы некоторые из этих технологий в ближайшем будущем.

