
Технологии дали нам новые возможности для исследования космоса, особенно с помощью роботов, которые оказались особенно эффективными инструментами для исследования других планет.
Если не считать неизбежного возвращения на Луну, самым близким достижением человека в космосе является исследование Марса. Захватывающее приключение, которое может обнаружить следы ресурсов или внеземная жизнь прошлое или настоящее: что, если бы мы столкнулись с роботизированной ящерицей?
На четвереньках на красной планете
Ученые Нанкинский университет аэронавтики и космонавтики они создали четвероногого робота, похожего на ящерицу, который может быть полезен для исследования Марса.
Этот робот, описанный в журнале Биомиметика MDPI (Я дам ссылку на исследование здесь), имеет гибкую структуру, имитирующую движения и походку пустынных ящериц.
В статье исследователи Гуанмин Чен, Лонг Цяо, Чжэньвэнь Чжоу, Лутц Рихтер e Айхонг Джи они пишут, что в силу своего состава местности (состоящего из зернистого грунта и камней разного размера) Марс может быть неподъемным для современных тяжелых марсоходов. Однако для четвероногого ползающего робота, вдохновленного передвижением ящериц, это была бы совершенно другая история. Блаженна она биомиметикавсегда.
Как устроена «космическая ящерица»?
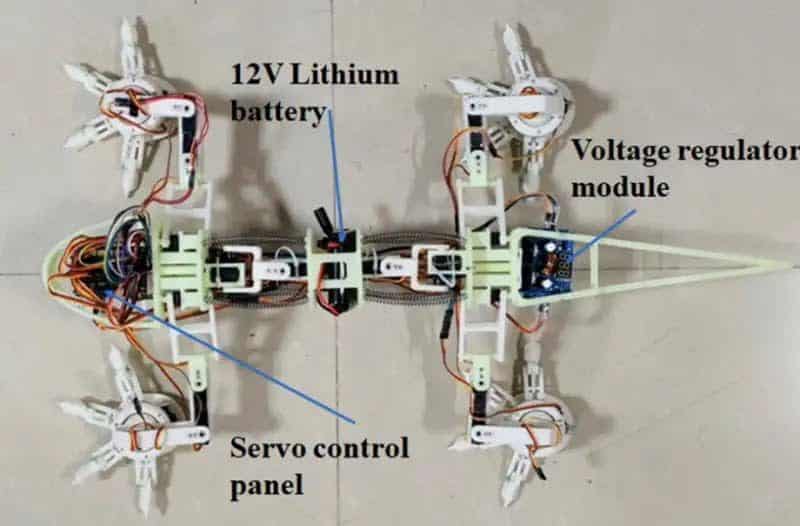
Биомиметический робот, созданный Ченом и его командой, состоит из гибкой конструкции, напоминающей позвоночник, и четырех ног. Чтобы имитировать «ползающее» движение ящерицы, каждая нога имеет два шарнира и шестерню, генерирующую колебания.
Тазобедренные суставы, соединяющие структуру позвоночника с ногами робота, состоят из двух серводвигателей и четырехточечного механизма, который позволяет роботу вставать, сохраняя равновесие. «Ноги» робота оснащены четырьмя гибкими «пальцами».
«Для определения движений робота, — читаем мы, — устанавливаются кинематические модели, относящиеся к ступням, ногам и позвоночнику, а также координация между позвоночником и ногами».
Следующие шаги
Сначала исследователи сначала моделировали, затем наблюдали (с прототипом 3D печать) работу своего робота, чтобы увидеть, способен ли он имитировать движения ящерицы. Даже на местности, «имитирующей» марсианскую суровость. Результаты? Очень обнадеживает: движения и рисунок ходьбы воспроизведены идеально.
Да, робот может эффективно двигаться в каменистой среде, у него есть потенциал для будущих миссий на Марс. Теперь потребуются улучшения: защитная конструкция от пыли, более прочные материалы, более совершенные алгоритмы, система бесперебойного питания.
Остальное уже, а точнее, станет историей: я уже вижу, как эту ящерицу «лапает» по телевизору по всему миру.

