
В соответствии с Национальная организация океанических и атмосферных исследований, доля океана, еще не исследованная, составляет более 80%. Нам еще предстоит изучить и нанести на карту километры и километры поверхности, прежде чем мы сможем почувствовать по-настоящему удовлетворение.
Однако освоение морей не так просто, как кажется.
Сами по себе корабли слишком медленны и слишком дороги для выполнения такой работы. Им нужна дополнительная помощь, союзник, на которого можно положиться в исследовании необъятной синевы.
Именно здесь в игру вступают технологии: производство водных роботов, способных погружаться глубоко под воду, контролируя океан и все его тайны.
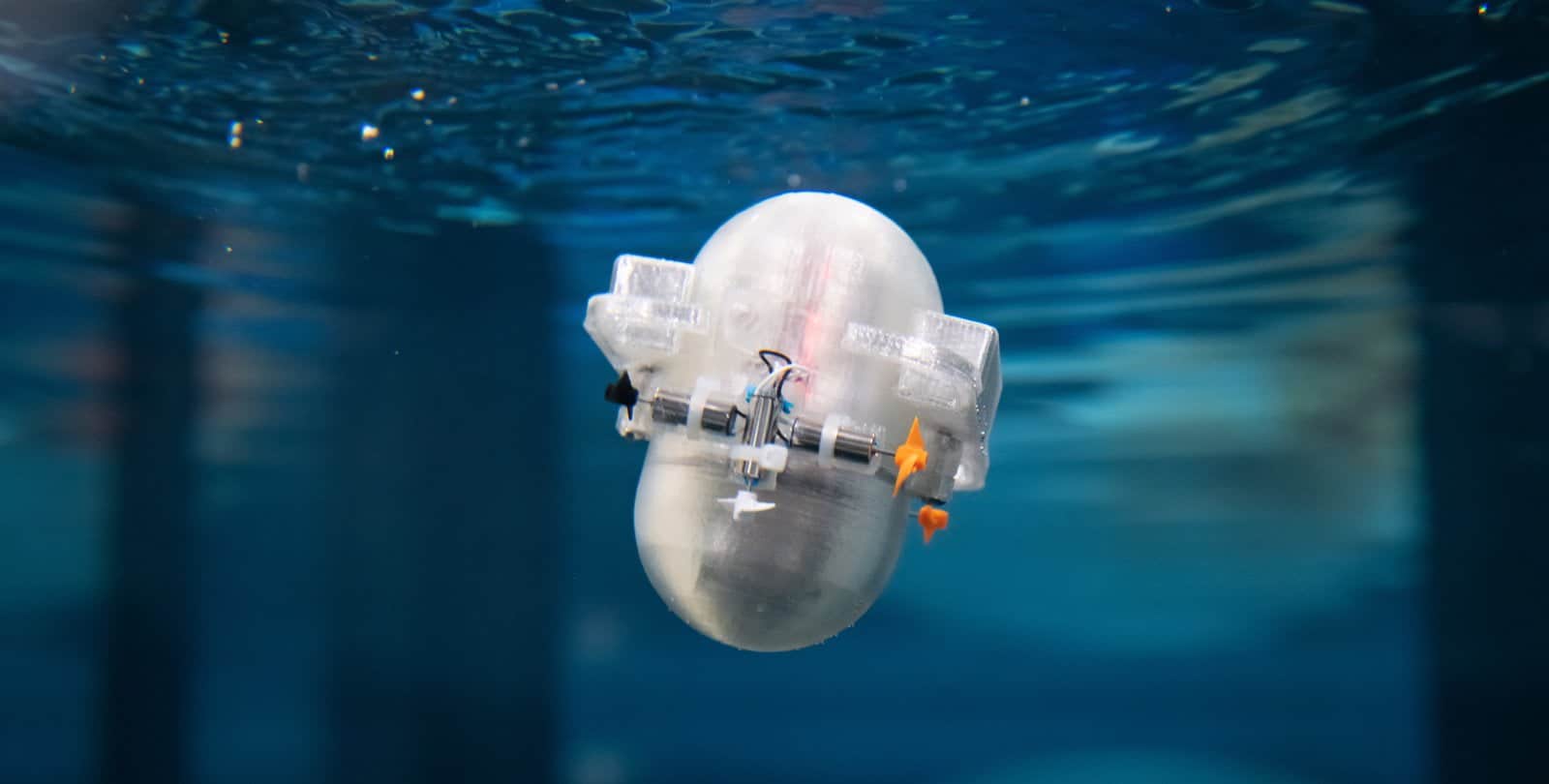
Это то, во что он верит Джон О. Дабири, профессор воздухоплавания и машиностроения Калифорнийского технологического института. Проект его команды привел к созданию КАРЛ-Бот (Автономный робот для обучения с подкреплением Калифорнийского технологического института), водный робот, чуть больше руки.
CARL оснащен внутренним микропроцессором, который позволяет ему свободно перемещаться и записывать все, что он наблюдает. Крошечная камера, способная проникнуть в самые неизведанные глубины океана, давая учёным возможность работать.
Память Карла и ее функционирование
Водный робот CARL обязан своим изобретением аспиранту Калифорнийского технологического института Питер Гуннарсон, которая произвела его в лабораториях Дабири.
На данный момент CARL получает ряд небольших изменений. Важно, чтобы он мог ориентироваться и ориентироваться в океане самостоятельно, без необходимости внешнего контроля.
Гуннарсон попросил помощи у компьютерного ученого Петрос Кумутсакос, которой удалось разработать для CARL алгоритмы искусственного интеллекта, потенциально способные научить ее ориентироваться на основе изменений в окружающей среде и прошлого опыта.
Природа связи опубликовали свое исследование только на этой неделе, продемонстрировав необычный характер проекта.
Алгоритмы, разработанные Комоутсакосом, используют память робота, его «воспоминания». Цель, как подтверждает Дабири, состоит в том, чтобы «используйте эту информацию, чтобы решить, как действовать в подобных ситуациях в будущем.
Лаборатория все еще работает полным ходом, и ученые пытаются выяснить, действительно ли CARL выполнит свою работу.
Ниже представлена презентация проекта Caltech.
Для проведения различных испытаний команда поместит CARL в резервуар с небольшими форсунками, способными генерировать горизонтальные потоки для перемещения.
Во время испытаний мы также позаботимся о регулировании и уменьшении нагрузки на датчиков пользователя CARL.
Когда робот оснащен такими инструментами, как LiDAR или фотоаппаратов, его способность оставаться в океане в течение длительного времени, прежде чем потребуется заменить батарею, становится весьма ограниченной. Уменьшив нагрузку на датчики, исследователи смогут увеличить время использования CARL и получить значительно лучшие результаты.
Проект «бионическая медуза», исследующий океан
Программное обеспечение CARL, учитывая его невероятную сложность, может стать «предвестником» для других инновационных проектов.
В прошлом году группа Дабири (все та же группа) опубликовала исследование, касающееся использования электрического разряда для контроля движений человека. медуза .
Добавление чипа, аналогичного чипу CARL, позволит исследователям лучше направлять медуз через океан.
В отличие от роботов, медузы не имеют ограничений по глубине, они могут достичь практически любого места.
CARL — это только начало гораздо более масштабного проекта, который позволит нам внимательно наблюдать за каждым уголком морской поверхности. Видение Дабири великолепен и полон энтузиазма, нам просто нужно дождаться следующих обновлений.
Можете ли вы когда-нибудь в будущем представить себе, что 10.000 XNUMX или миллион CARL (я думаю, мы дадим им разные имена) все отправятся в океан для измерения регионов, к которым мы просто не можем получить доступ сегодня в одно и то же время, чтобы получить изображение с разрешением во времени того, как меняется океан. (…) Это будет действительно важно для моделирования прогнозов климата, а также для понимания того, как работает океан.

