
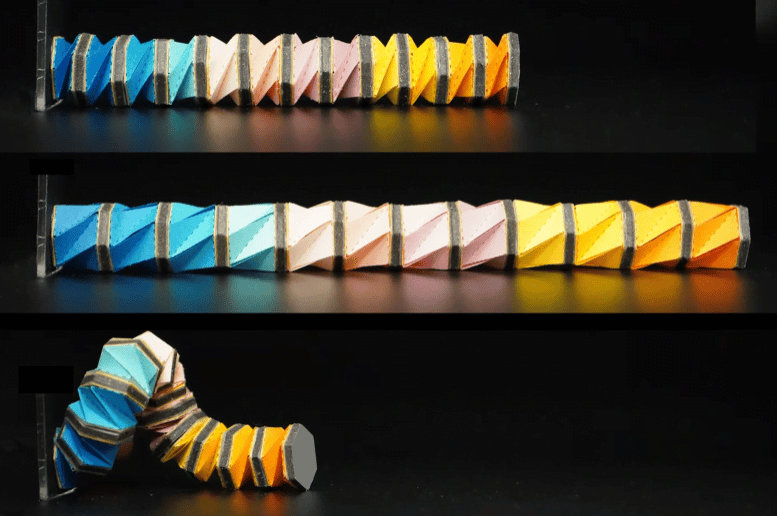
В своей удлиненной форме эта роботизированная рука выглядит как гармошка, которая может эффективно расширяться и складываться для тысяч применений.
Этот дизайн, подробно описанный в новом исследовании опубликовано в журнале PNAS, вдохновлен щупальцем осьминога и имитирует то, как оно растягивается, скручивается и манипулирует объектами. Его создатели надеются, что его можно будет интегрировать в биомедицинские приложения для оказания помощи в инвазивных процедурах или операциях, таких как введение дыхательной трубки через рот или установка катетера.
«Нервная система осьминога расположена в его щупальцах», — говорит он. Руике Рене Чжао, доцент кафедры машиностроения Стэнфордского университета и автор новой статьи.
Мы здесь имитируем его очень умную систему рук. Поскольку щупальца осьминога настолько универсальны, что они могут совершать сотни, тысячи различных движений для взаимодействия с объектами.
Руике Рене ЧжаоСтэнфордский университет
Как создается новая роботизированная рука в стиле осьминога
Новая роботизированная рука обязана своей гибкостью некоторым ключевым функциям, включая движения, приводимые в действие магнитным полем, а не двигателями, панели в стиле оригами и мягкий экзоскелет.
Осьминог "оригами"
Серия крошечных сегментов составляет одну руку этого мягкий робот. Внутри каждого сегмента две шестиугольные пластины из мягкого силикона, встроенные в наклонные пластиковые панели с магнитными частицами и украшенные узором оригами. Креслинг, стиль оригами, который изгибается, чтобы растягиваться и сжиматься. Форма панелей позволяет руке расширяться в трубку или сжиматься в сжатую форму, как щупальца осьминога.
Благодаря намагниченным пластинам, расположенным по всей руке, роботом-осьминогом можно управлять дистанционно с помощью сильного магнитного поля, похожего на то, которое создается внутри сканера МРТ. На этапах тестирования исследователи использовали электромагнитные катушки для создания трехмерного магнитного поля вокруг руки. Регулируя направление магнитного поля вокруг руки, они могут управлять движением и деформацией отдельных блоков оригами. Конструкция также позволила исследователям независимо контролировать каждый сегмент руки для точной настройки движений.
Управляя внешним магнитным полем, мы можем контролировать удлинение, изгиб и другие комбинации. Мы смогли проверить точную точку, с которой робот-осьминог начинает изгибаться.
Руике Рене ЧжаоСтэнфордский университет
Чрезвычайная универсальность
В руке можно настроить все, от силы намагничивания до размеров, материалов, из которых она сделана, и количества единиц, из которых она сделана.
Возможность получить робота, который может двигаться без необходимости использования двигателей, является абсолютно невероятным фактором. Это позволяет действительно минимизировать размер всей роботизированной системы «осьминог» и резко увеличить количество возможных приложений.

